協働ロボットシステム
適用シーン・生産ライン応用
- 協働ロボット自動化システムは、搬送・パレタイジング・レーザー統合などの用途に対応可能です。
- グラフィカルプログラミング、多様な産業用通信プロトコル、高い保護設計に対応しています。
- スマート製造の導入および生産ライン自動化に適しています。
制御と統合能力
自動化導入で重要なのはロボット本体だけではありません。より重要なのは、制御方式、通信インターフェース、そして現場設備との統合効率です。

- RS485 エンドインターフェース
外部設備やデータ伝送モジュールとの接続がしやすく、追加変換や導入時の複雑さを低減します。 - 多様な I/O 構成
24 DI / 24 DO、2 AI / 2 AO に対応し、より多くのセンサーや実行部品を統合できます。 - ERP400 / ERP400S ティーチペンダント
グラフィカルな操作画面を提供し、現場での操作効率とパラメータ調整のしやすさを両立します。 - オープンな統合能力
Python、WebUI、サードパーティープラットフォームに対応し、シミュレーション、展開、カスタマイズ拡張に便利です。 - 産業用通信プロトコル対応
RS485、MODBUS TCP / RTU、TCP/IP、Profinet、EtherNet/IP
モジュール式パレタイジングワークステーション応用
CP シリーズのモジュール式パレタイジングワークステーションは、箱形状、パレットサイズ、積載高さの要件に応じて構成でき、固定ベースおよび昇降ベース仕様に対応しています。短期間での立ち上げと柔軟な段取り替えが求められる用途に適しています。
30 kg
最大可搬重量
異なるロボット構成と組み合わせることで、多様な搬送・パレタイジングニーズに対応します。
2.4 m
最大積載高さ
ベース仕様や用途条件に応じて、異なる積載高さ要件に対応可能です。
20 箱/分
特定条件下での最高速度
一般的な仕様では、シングルグリッパー 7 箱/分、デュアルグリッパー 14 箱/分です。
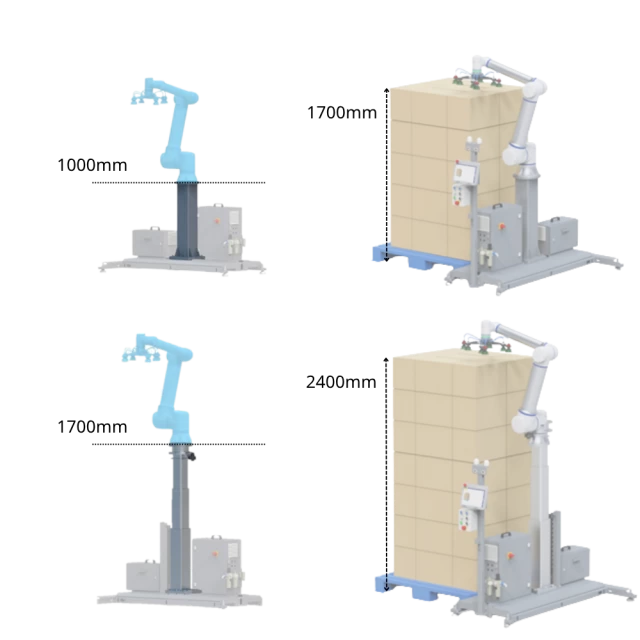
固定ベースまたは昇降ベースで、用途に応じて柔軟に構成
CP シリーズは、パレットサイズ、箱仕様、積載高さの要件に応じて、固定ベースまたは昇降ベース仕様を組み合わせ、異なる生産ラインや物流用途条件に対応します。
- 短期間での立ち上げと柔軟な段取り替えが求められるパレタイジング用途に適しています
- 異なる生産ライン要件に応じて、CS620、CS625、CS530H などの機種と組み合わせ可能です
- 作業効率、空間配置、将来的な拡張性を両立します
よくあるご質問
協働ロボットの導入、自動パレタイジング、レーザー加工の統合をご検討中の方から、特によくいただくご質問をまとめました。
はい。協働ロボットシステムはレーザー設備を併用せずに単体導入が可能です。また、製造ラインの要件に応じて、搬送、パレタイジング、レーザー加工などの自動化アプリケーションへの統合にも対応しています。工程条件や自動化の目的に合わせて柔軟に導入計画を立てることが可能です。
協働ロボットシステムは、柔軟な配置と複数工程の統合が求められる自動化用途に適しています。例えば、搬送・供給、パレタイジング、レーザー加工の統合、製造ラインの工程連携などに対応可能です。また、複数の通信プロトコルや制御統合が必要なアプリケーションにも適しています。
モジュール式パレタイジングワークステーションは、最大2.4mの積み上げ高さに対応しています。処理速度は構成条件により異なりますが、一般的には1分あたり7~14箱、最適化条件では最大20箱/分まで対応可能です。実際の性能は、グリッパー設計、箱サイズ、稼働条件により変動します。
はい。RS-485、MODBUS TCP / RTU、TCP/IP、Profinet、EtherNet/IP などの通信プロトコルに対応しており、製造ラインや設備要件に応じたカスタマイズ制御が可能です。複数システムの連携が求められる自動化環境にも柔軟に対応できます。